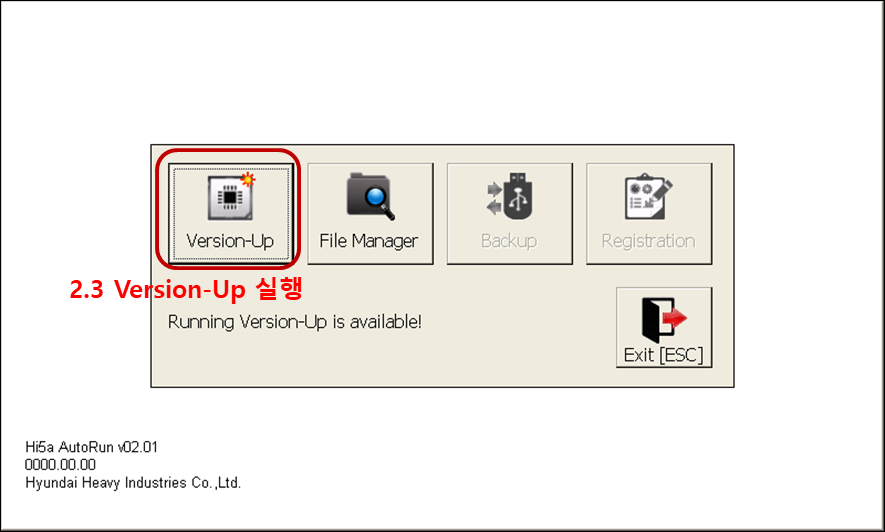
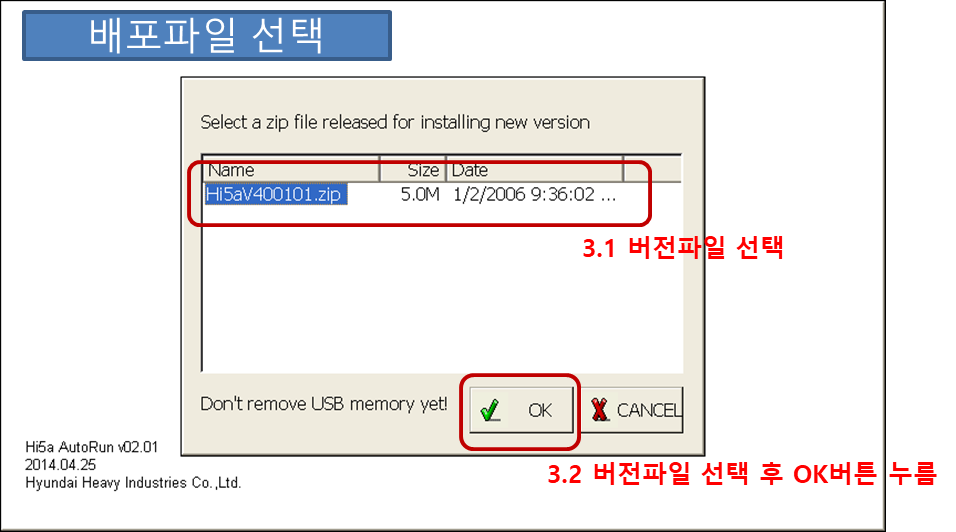
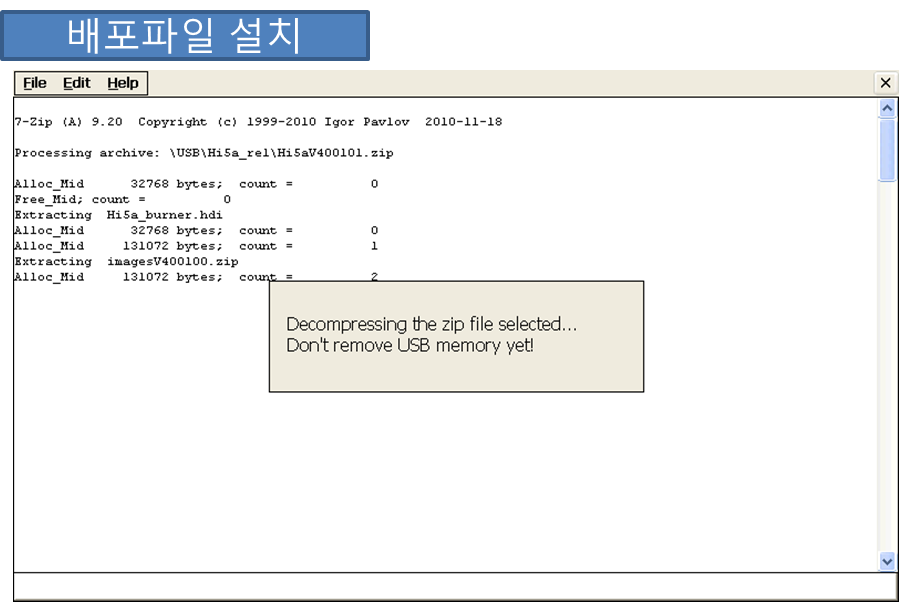
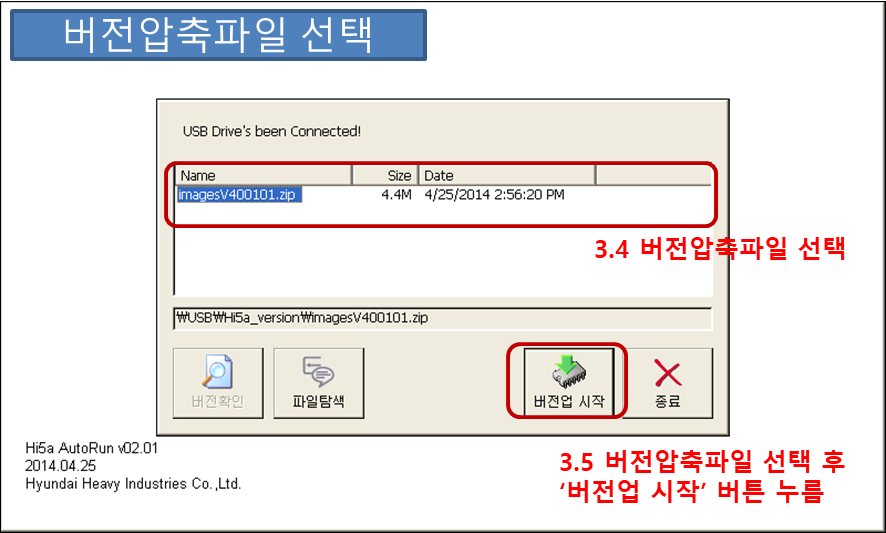
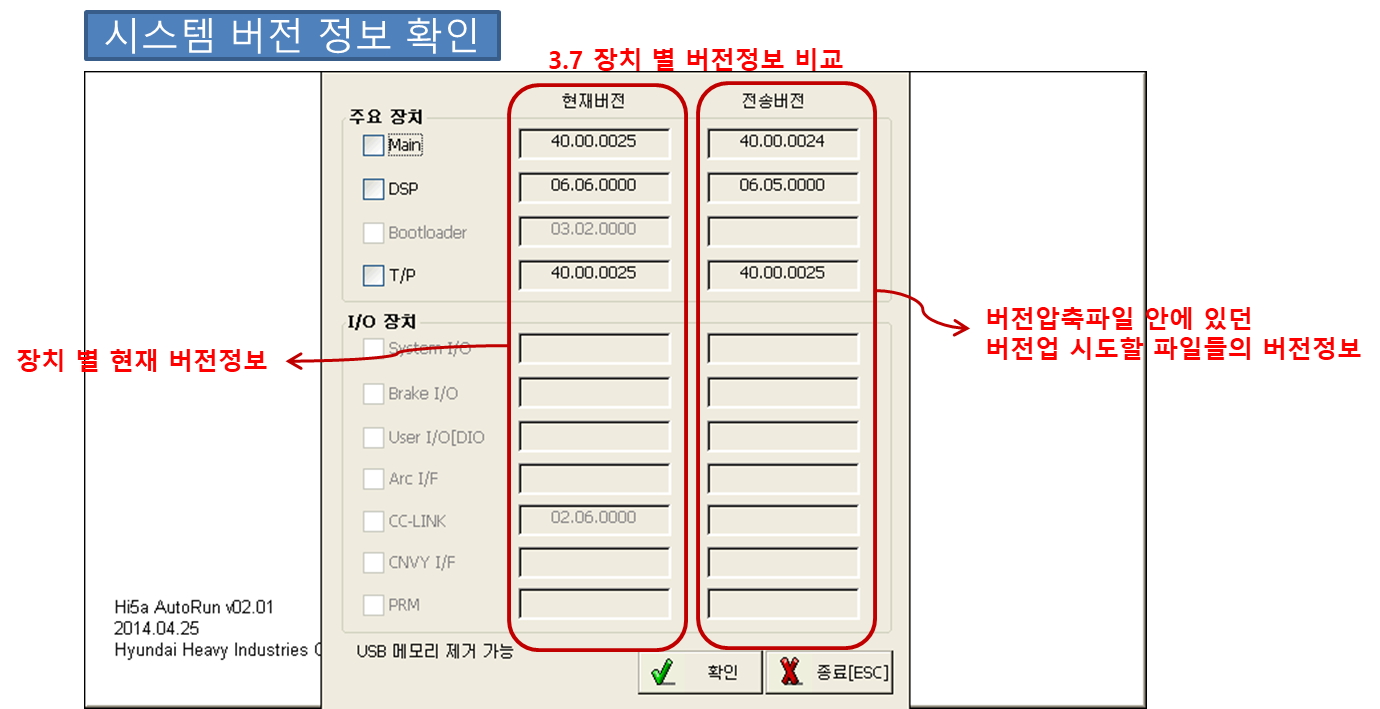
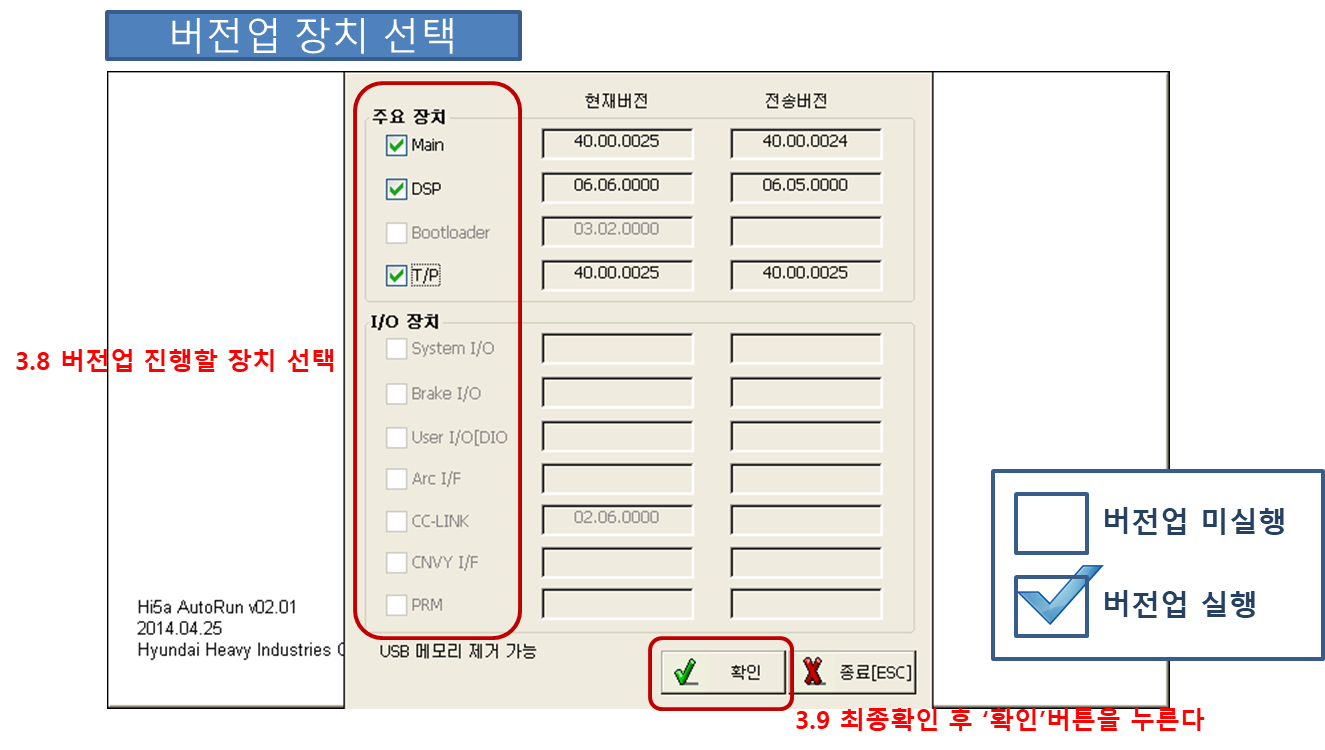
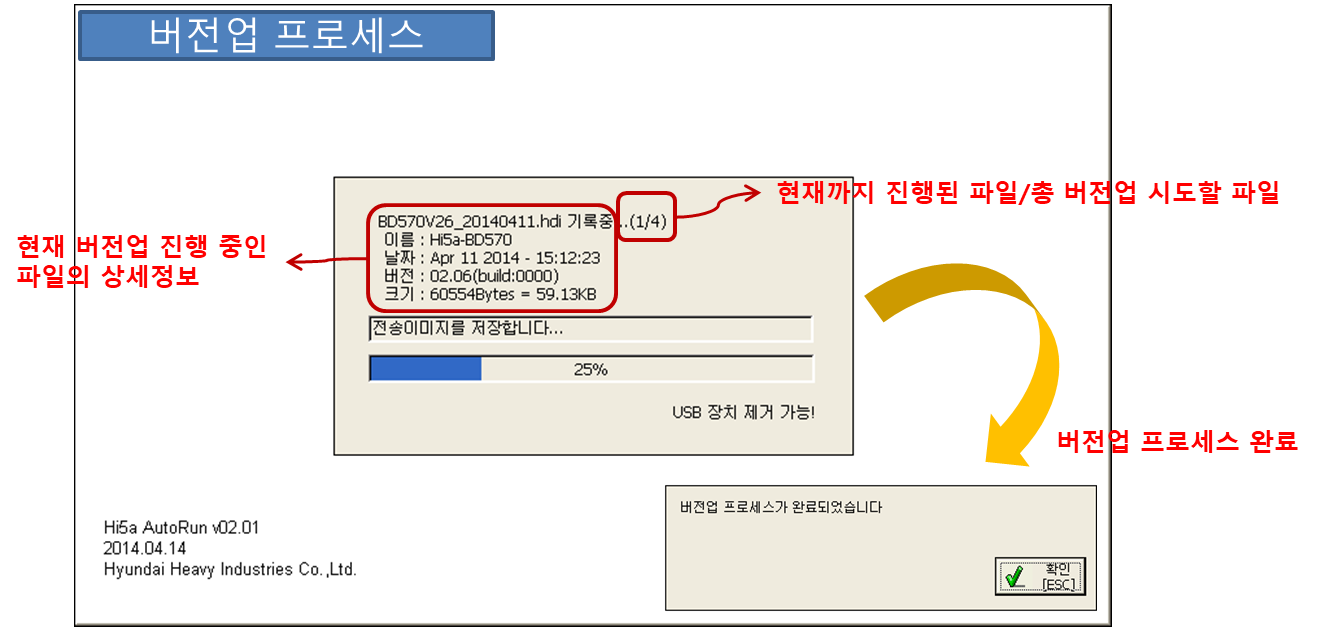
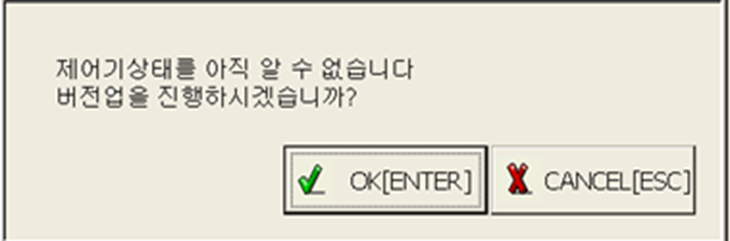
- How to upgrade Hi5a controller version
- Separate use of TP520, TP530 SW
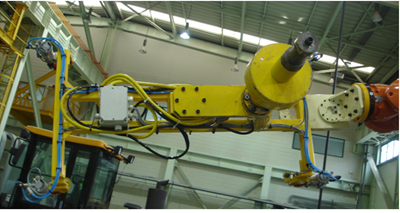
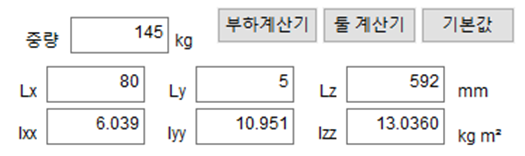
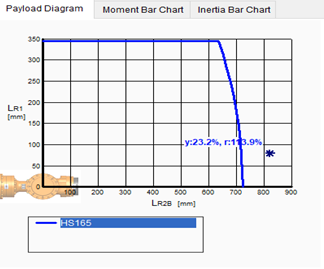
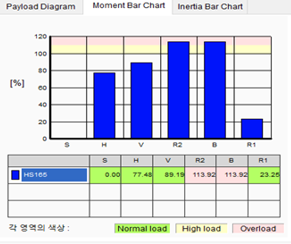
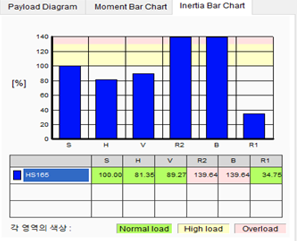
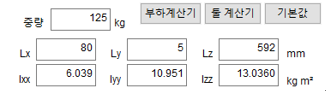
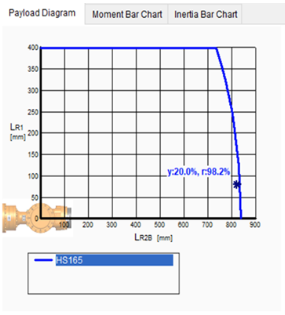
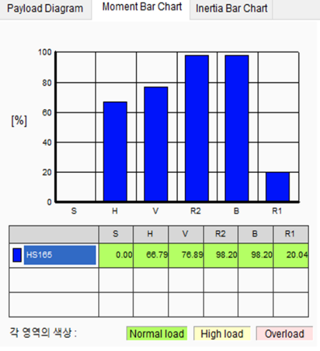
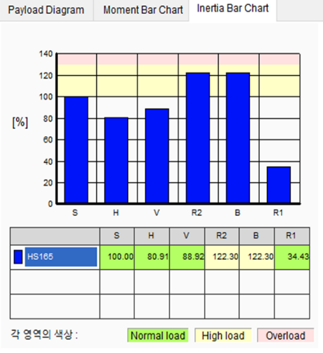
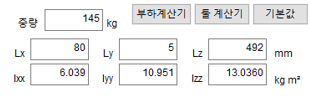
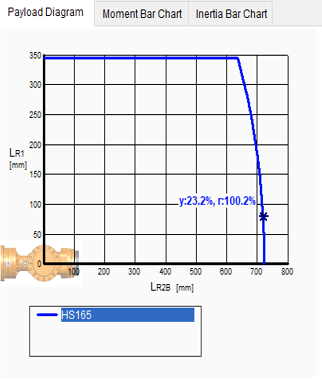
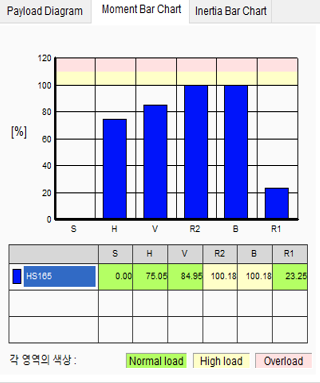
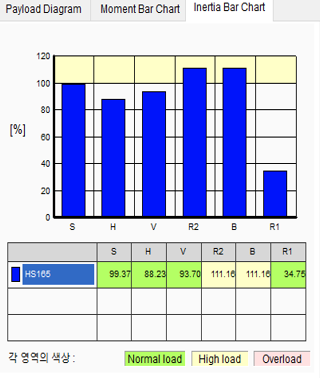
- Understanding robot payload
- Notice on prohibition of mixing reducer grease (VIGO + EUREKA)
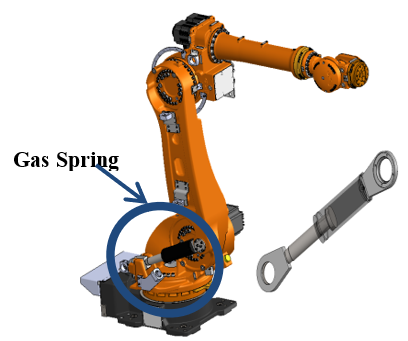
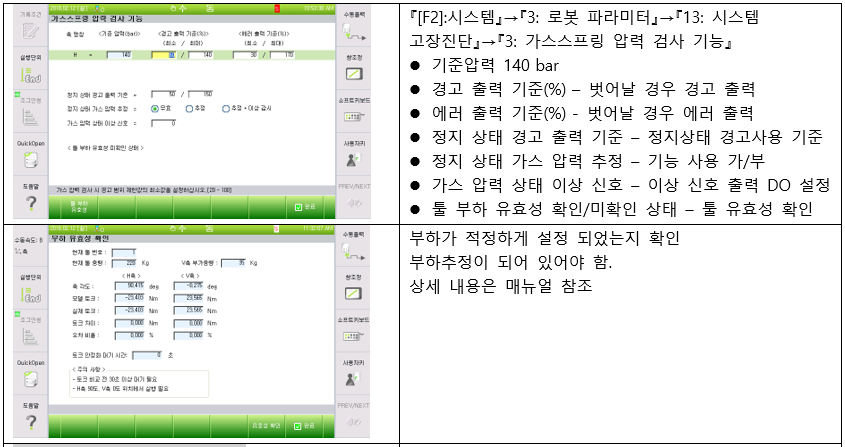
- Gas spring management (monitoring)
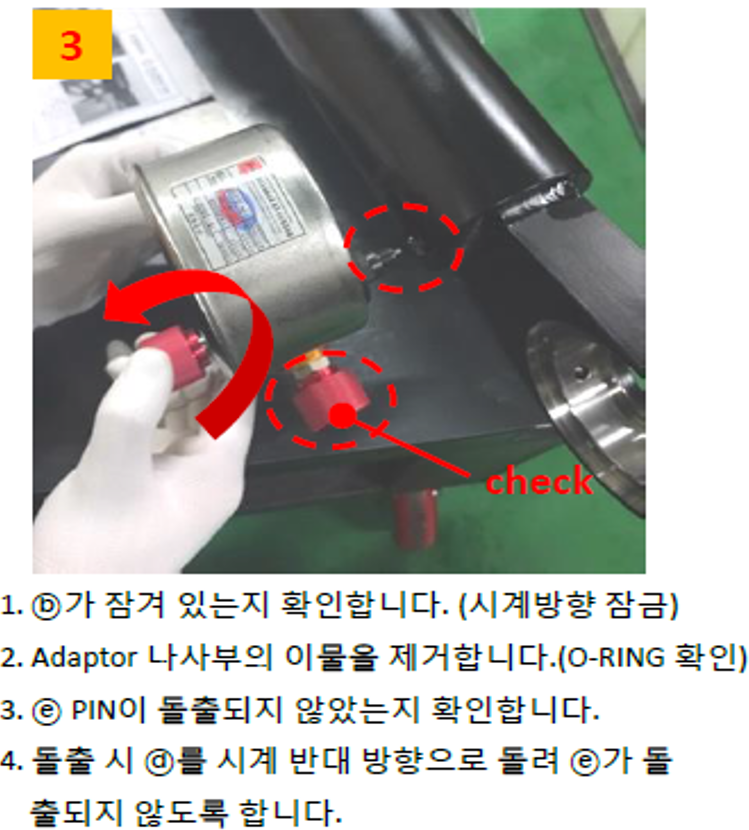
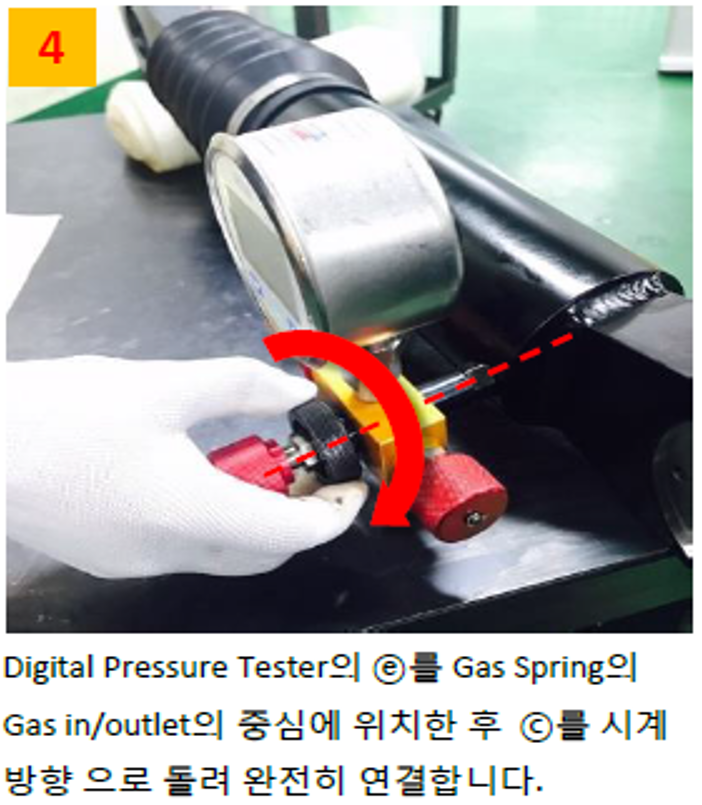
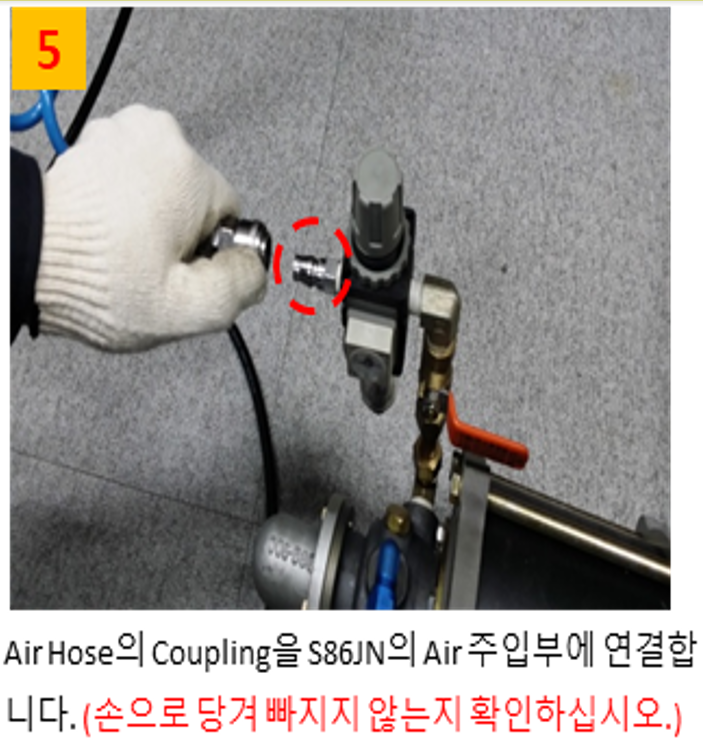
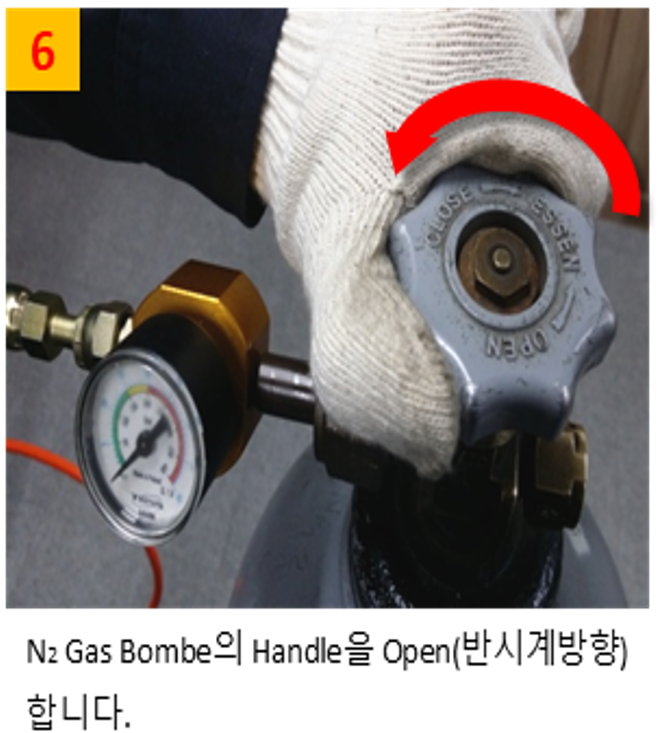
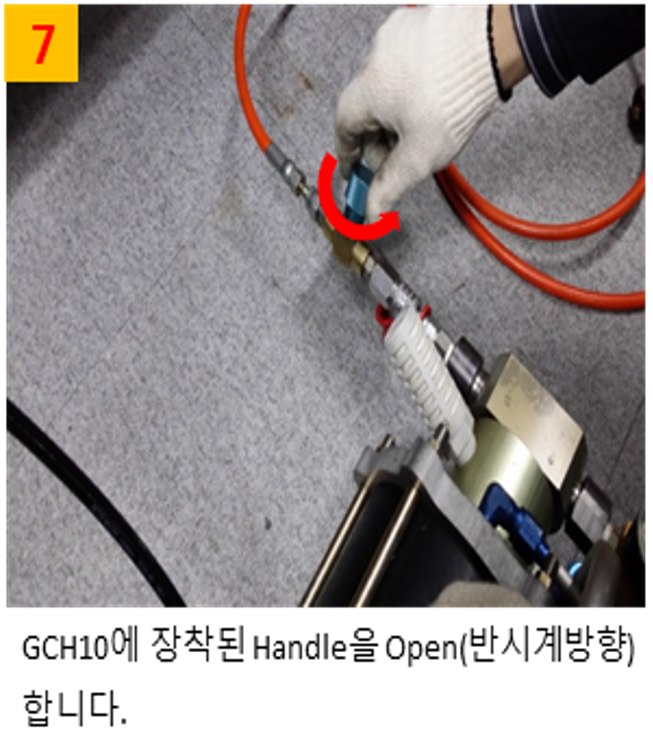
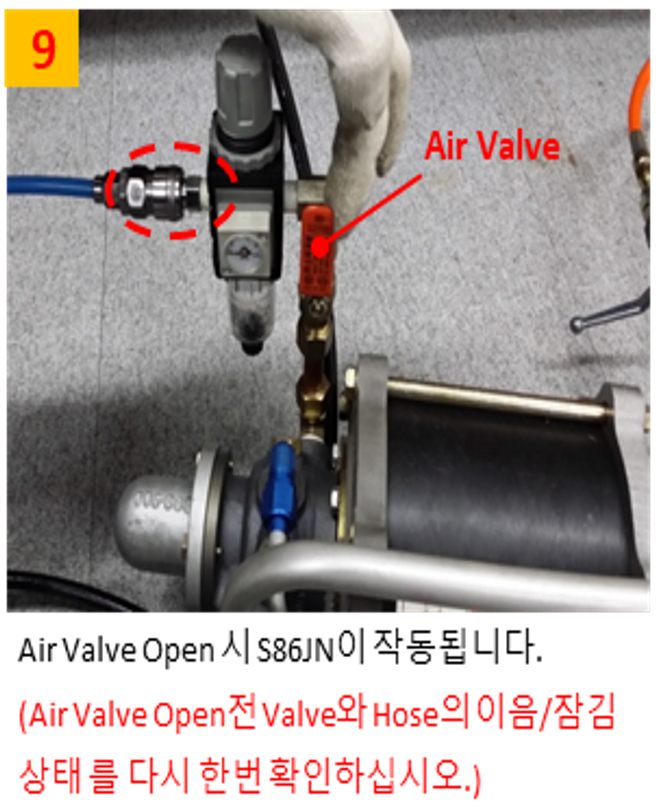
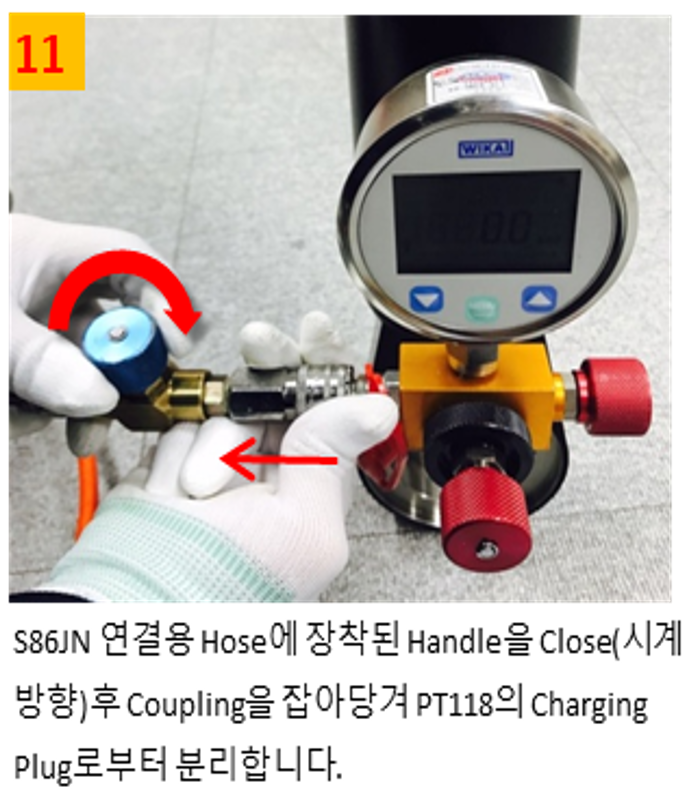
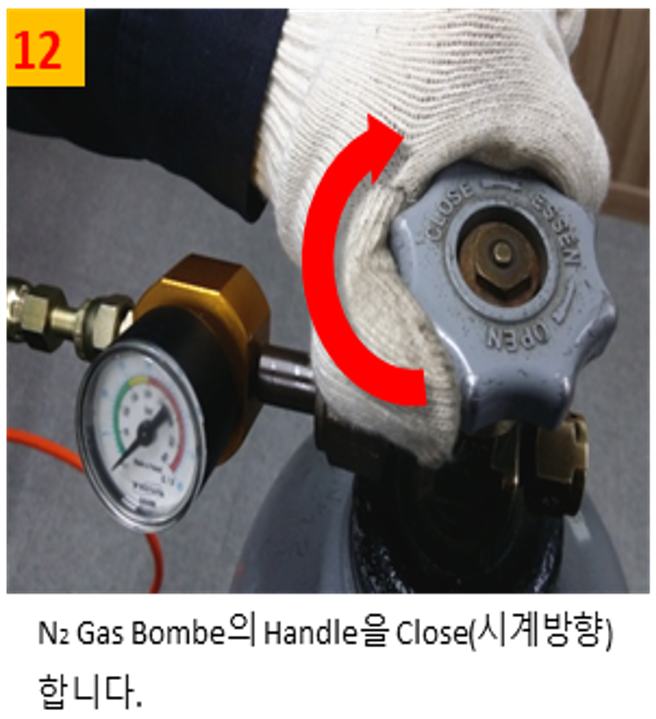
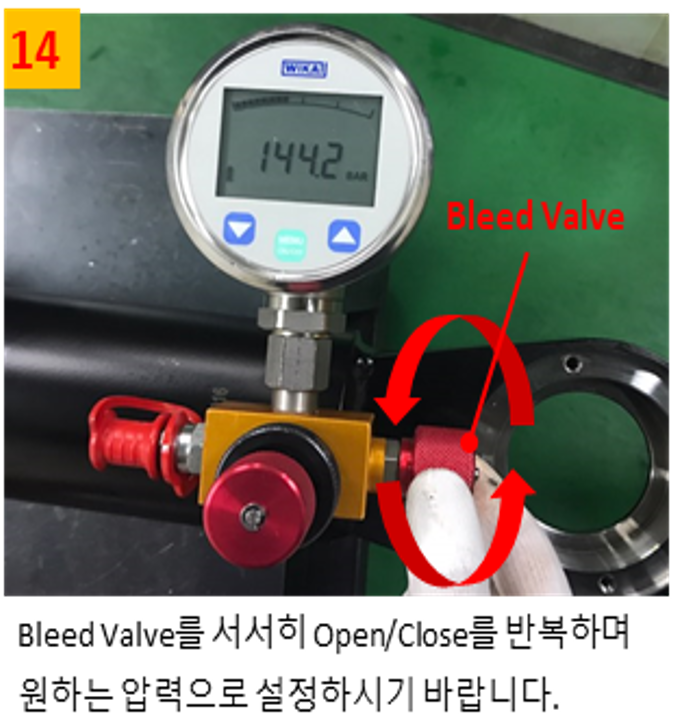
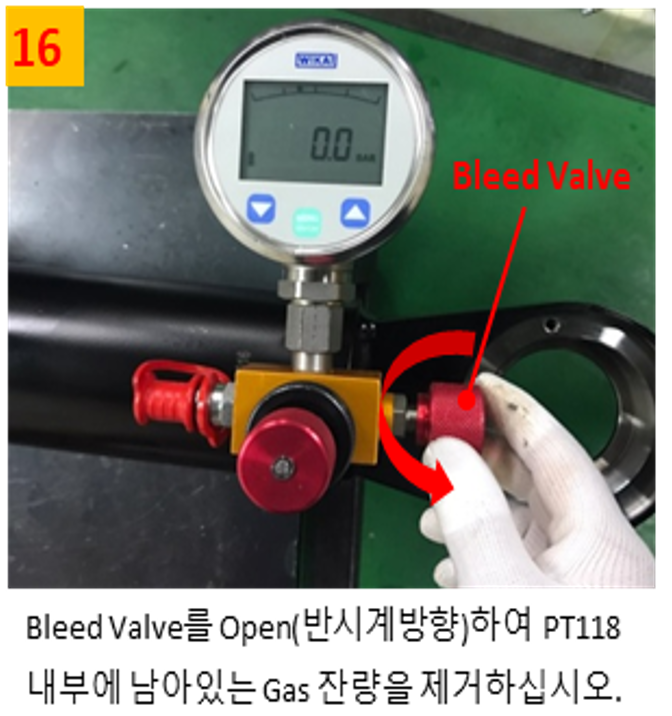
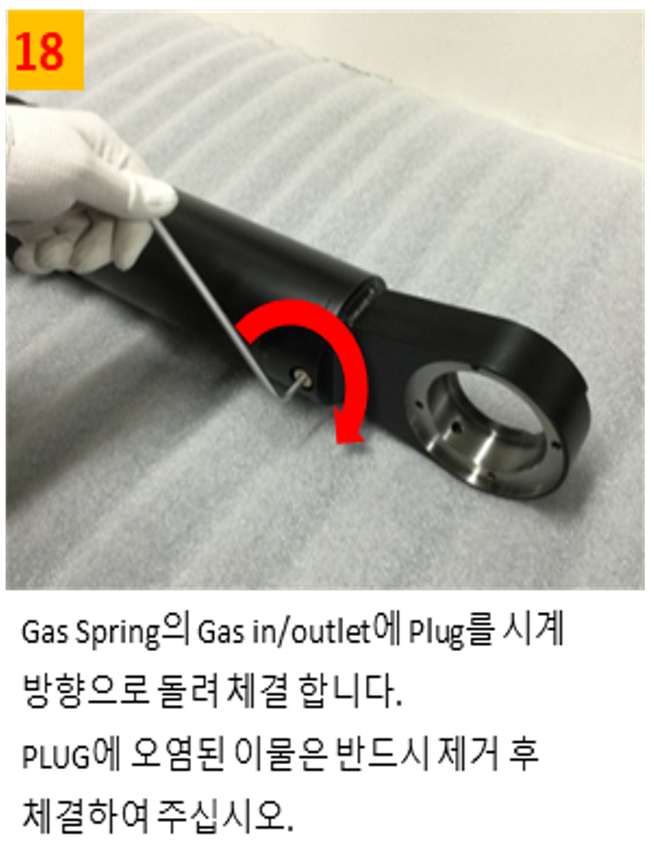
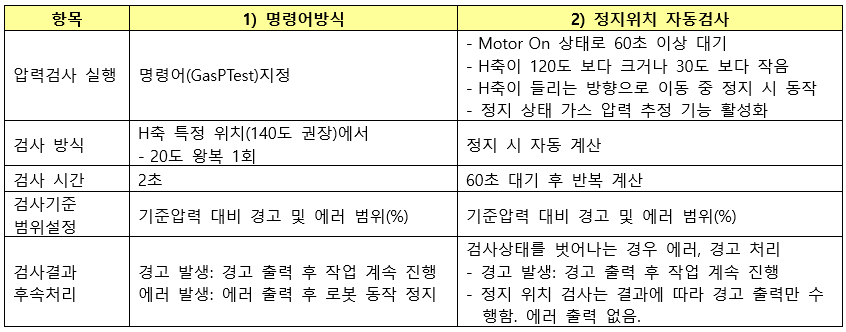
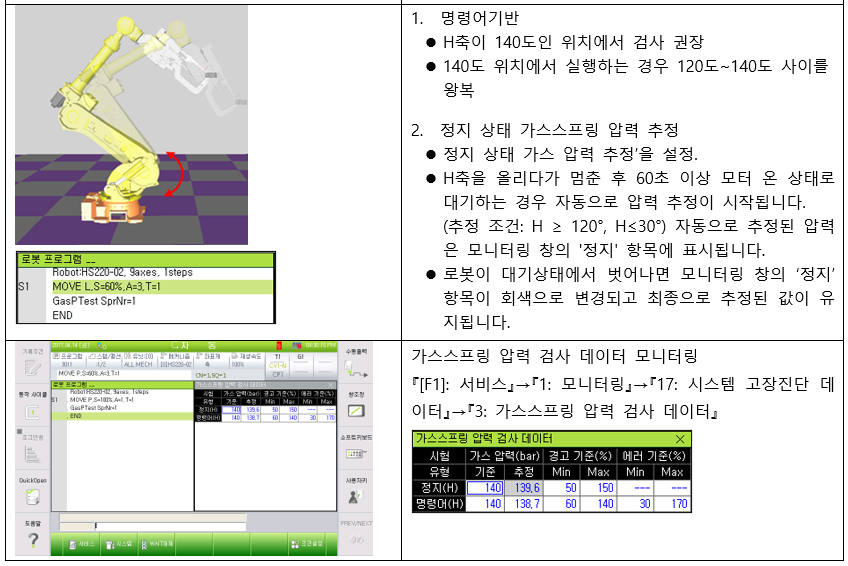
- Gas spring management (pressure inspection, injection)
- Gas spring maintenance (inspection)
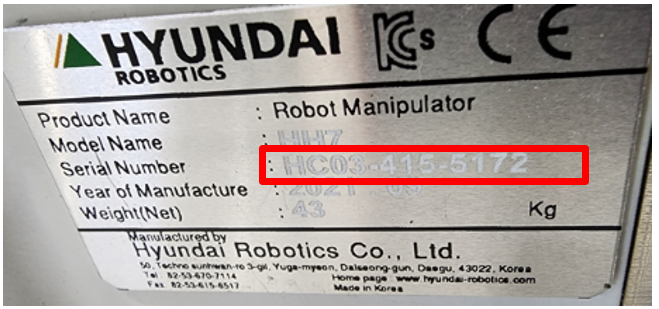
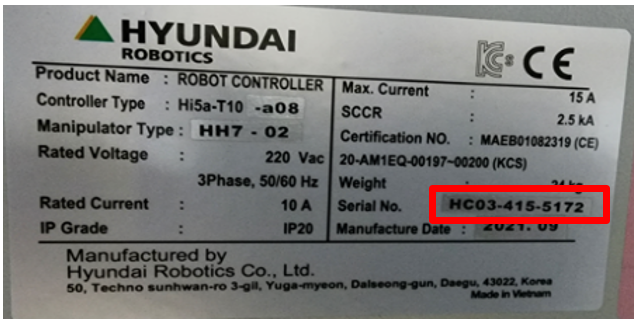
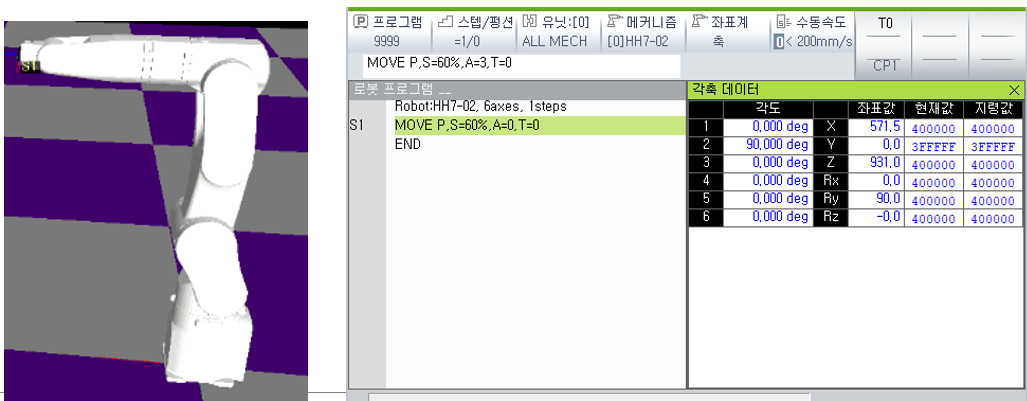
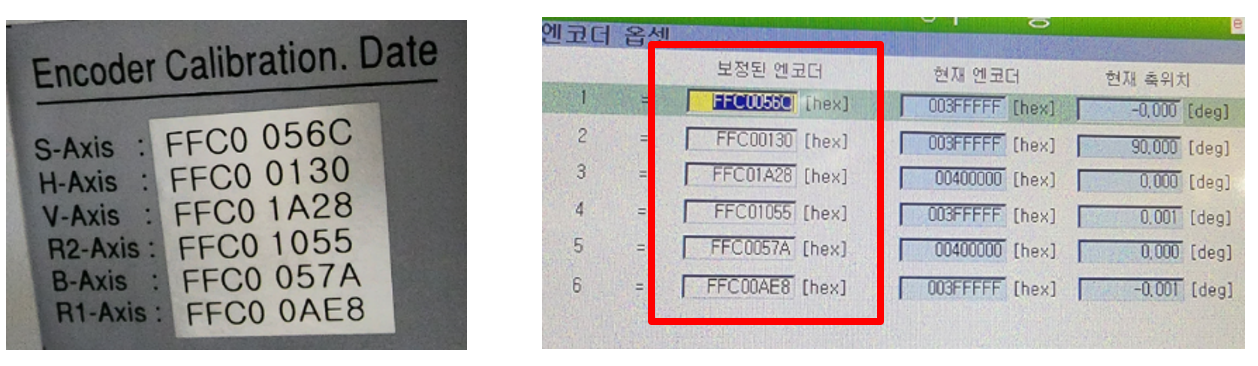
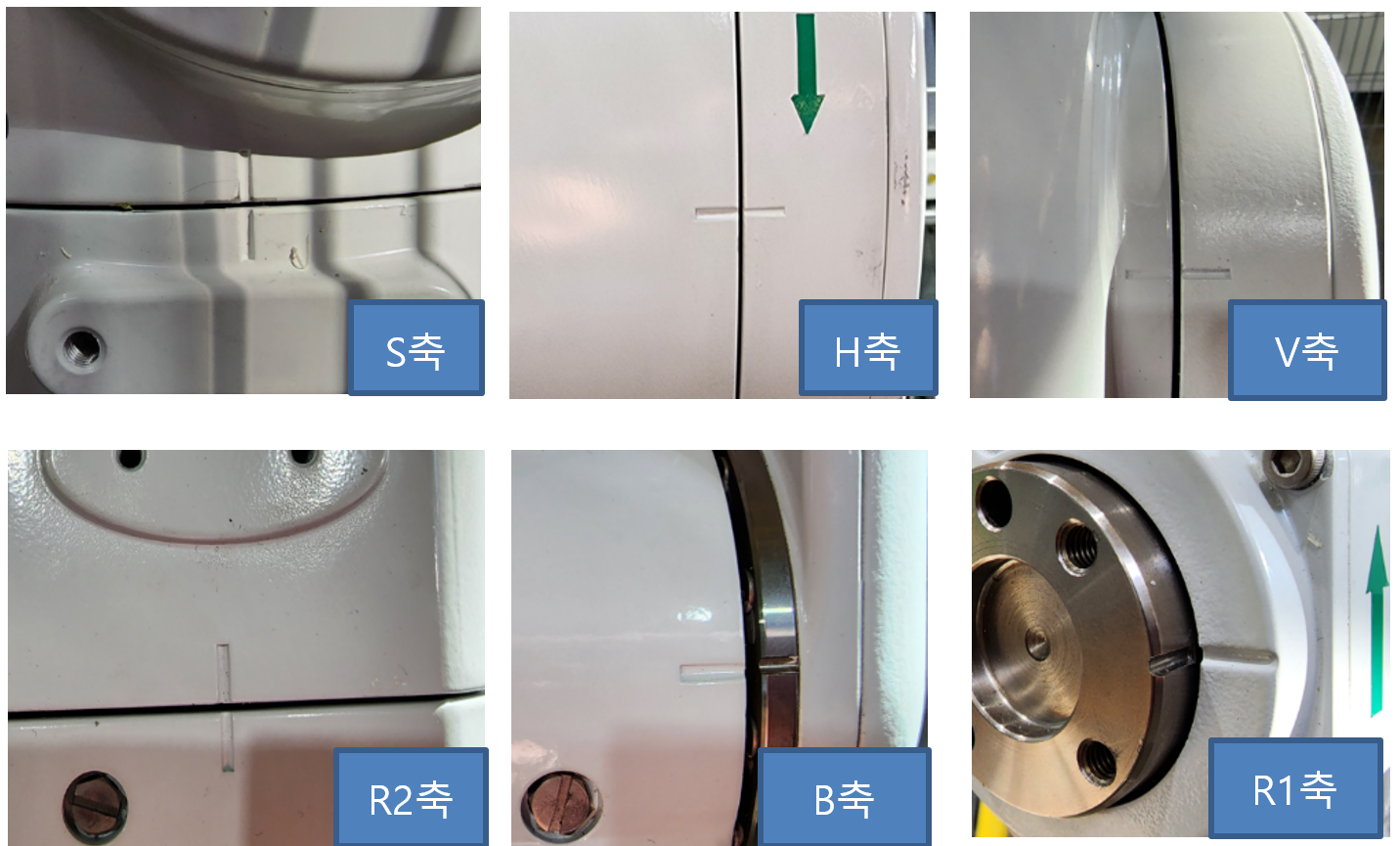
- How to check HH7 robot origin
- Gas spring management method, inspection and replacement cycle
- Notice of discontinuation of Hi3 robot parts
Index
· One min read





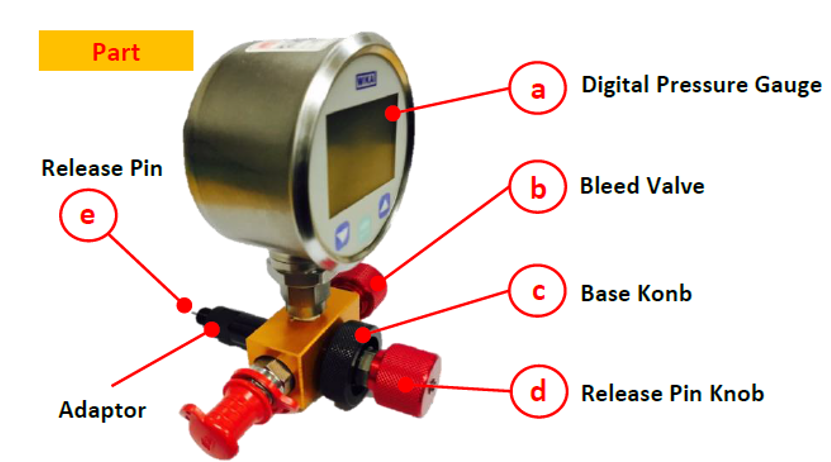
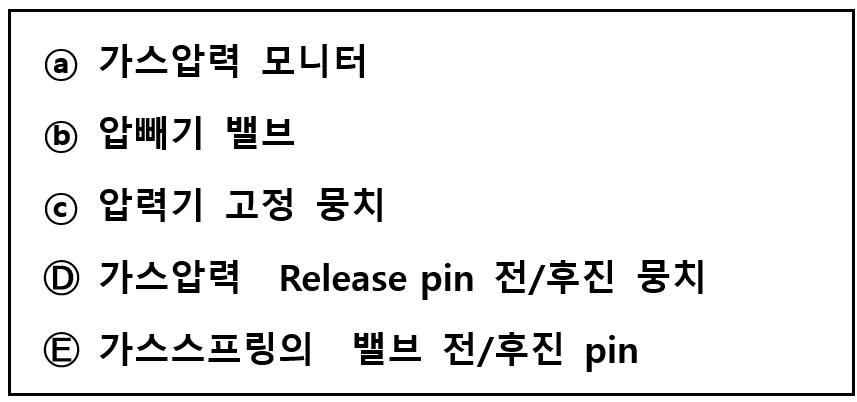
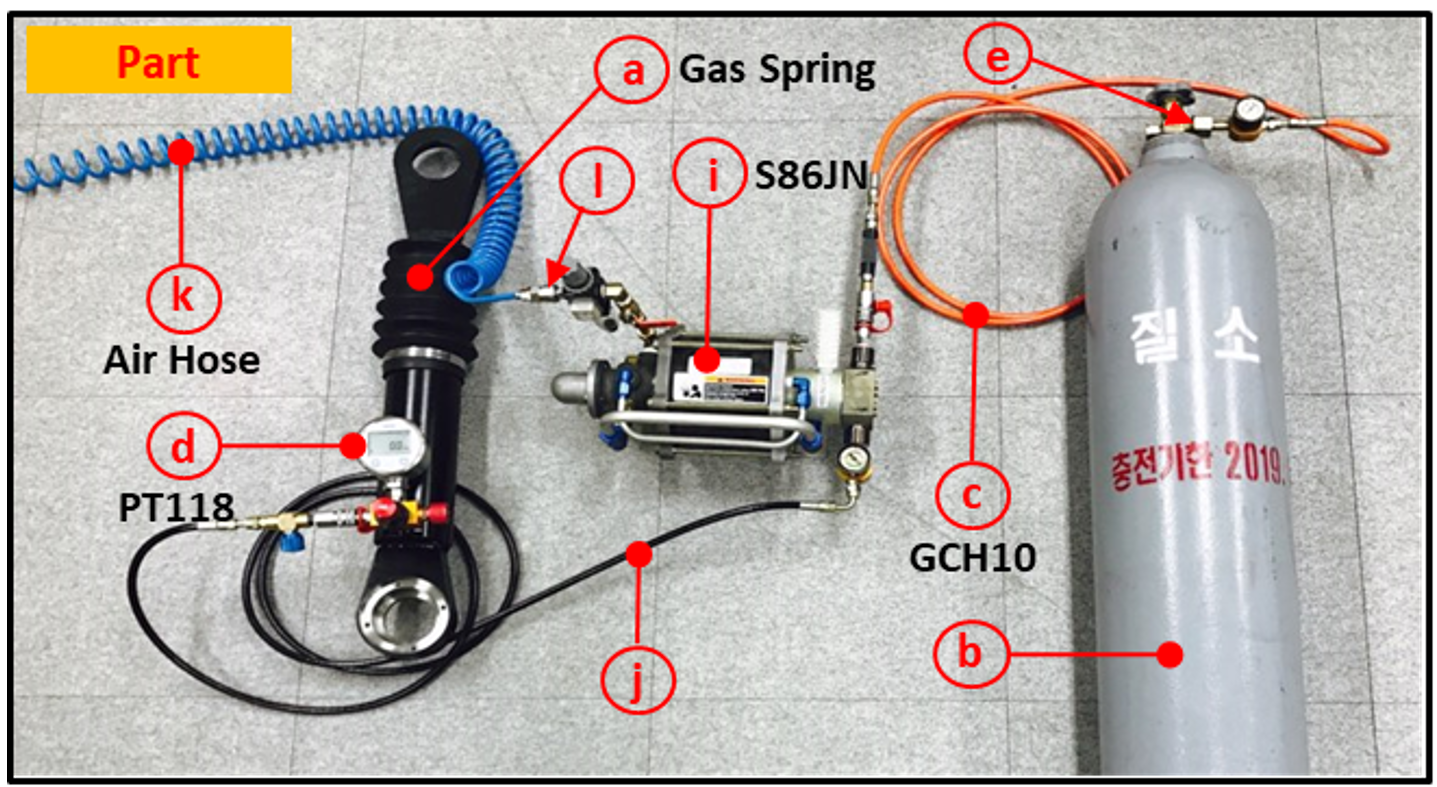
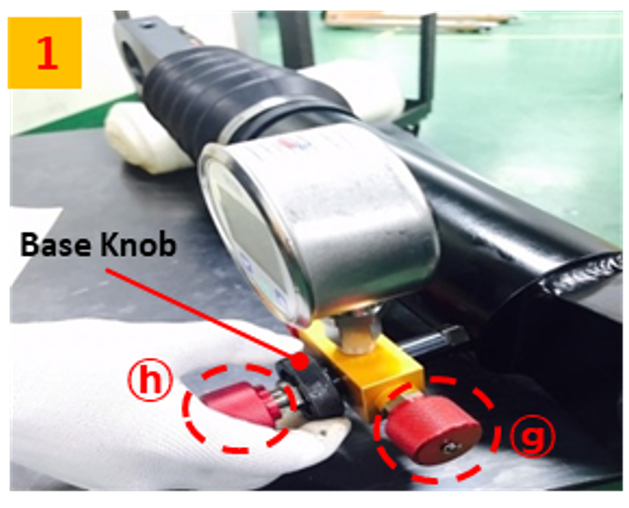
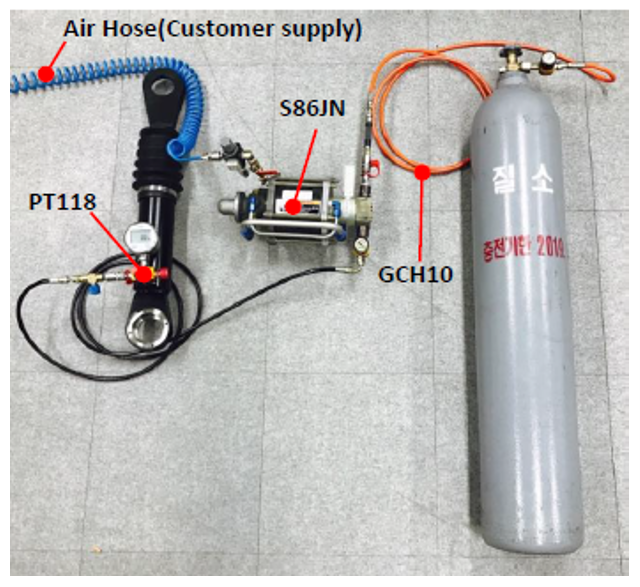 가스스프링 충진기 SET
가스스프링 충진기 SET
 (디지탈 압력 측정기)
(디지탈 압력 측정기)
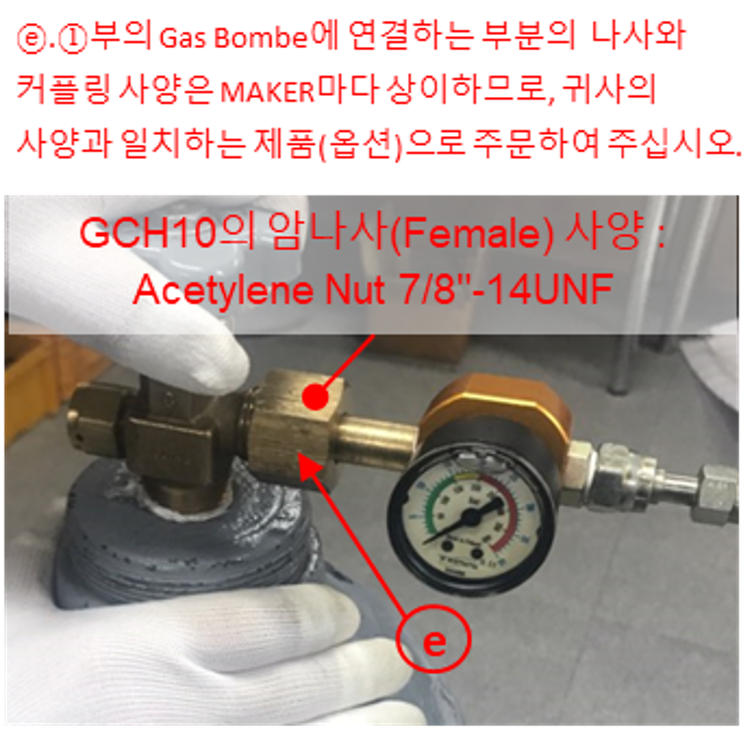
 (압력 주입 부스터)
(압력 주입 부스터)